最新更新于: 2024年5月24日上午11点17分
第六周把重积分讲完了进入下一章(好像没讲广义重积分),进入学习曲线积分,先是定义较多,对定义的理解很重要,上一章的习题课还要补()。
(分段)光滑曲线及其长度
定义1(简单曲线)
设 C⊂Rn,α:[a,b]→C,满足:
-
α 为双射。
-
α,α−1 连续。
则称 C 为 Rn 中的简单曲线,称 α 为 C 的参数方程。
设 P∈C, P=α(t0),则称 t0 为 P 的参数或坐标。
若 t0∈{a,b},则 P 为端点,若 a<t0<b,则 P 为内点,由内点构成的集合称为内部。
不难发现,要求双射,则 C 一定不能有交点,要求连续,则 C 不能有间断点。
定义2(光滑曲线)
设 C⊂Rn,α:[a,b]→C,满足
-
α 为双射,α,α−1 连续(简单曲线)。
-
α∈Ck, (1⩽k⩽+∞)(光滑性)。
-
α′(t)=0, ∀t∈[a,b](正则性)。
则称 C 为 Ck−光滑的正则曲线(也称光滑曲线),称 α 为 C 的参数方程。
光滑曲线的正则性能够保证切线存在(也就是说折线不是光滑曲线)。
令 α 为光滑曲线 C 的参数方程,∀t∈[a,b],则 α(t) 处的切向量为 α′(t),单位切向量为 τ=∣α′(t)∣α′(t),α(t0) 处的切线为:
l={α(t0)+α′(t0)(t−t0):t∈R}
比如:α(t)=(t2,t3),t∈[−1,1],C=α([−1,1]),图像如下:
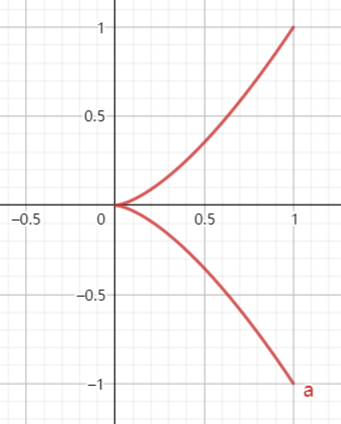
α′(0)=0,C 在 (0,0) 处并不光滑。
定义3(曲线长度&弧长)
设 C⊂Rn 为光滑曲线,α:[a,b]→C 为 C 的参数方程,设 π:a=t0<t1<⋯<tN=b 为 [a,b] 的分划,记
S=i=1∑N∣α(ti−1)α(ti)−−−−−−−−→∣
如果 Δπ→0limS 存在,记 L(C)=Δπ→0limS,并称之为曲线 C 的长度(弧长)。
其中 AB−−→ 表示:以 A 为起点,B 为终点的向量(不用向量减法,因为可以不用建系)。
形象理解这个定义,就是把曲线分成很多小段,然后求和,得到整个弧长。
KATEX 中实在没有找到长箭头,只能用 −−→ 代替了~~
定理4(弧长的积分形式)
设 C⊂Rn 为光滑曲线,α:[a,b]→C 为 C 的参数方程,则
L(C)=∫ab∣α′(t)∣dt
思路: 对 ∫ab∣α′(t)∣dt 展开成 Riemann和 的形式,再对两式进行估计即可。
证明:
由于当 Δπ→0 时,∫ab∣α′(t)∣dt=i=1∑N∣α′(ti−1)∣(ti−ti−1)
(使用两次三角不等式)⩽=⩽令ω(Δπ)=∣t−s∣⩽Δπsup∣α′(t)−原式⩽∣∣∣∣∣∣i=1∑N∣α(ti−1)α(ti)−−−−−−−−→∣−i=1∑N∣α′(ti−1)∣(ti−ti−1)∣∣∣∣∣∣i=1∑N∣α(ti−1)α(ti)−−−−−−−−→−α′(ti−1)(ti−ti−1)∣i=1∑N∣∣∣∣∣∫ti−1tiα′(t)dt−∫ti−1tiα′(ti−1)dt∣∣∣∣∣i=1∑N∫ti−1ti∣α′(t)−α′(ti−1)∣dtα′(s)∣,由α′的一致连续性知ω(Δπ)→0(b−a)⋅ω(Δπ)→0
QED
于是我们就可以愉快地求圆的周长了(
例一(圆的周长)
C={(x,y):x2+y2=1,y⩾0},计算 L(C)。
解: C 的参数方程为:α(θ)=(cosθ,sinθ), θ∈[0,π],则
L(C)=∫0π1dθ=π
例二(二维函数图像的长度)
f∈C1([a,b]), C=graph f={(x,f(x)):x∈[a,b]},求 L(C)。
解: C 的参数方程为:α(x)=(x,f(x)), x∈[a,b],则
L(C)=∫ab1+∣f′(x)∣2dx
定义5(分段光滑曲线)
设 C⊂Rn,α:[a,b]→C 连续,设 a=a0<a1<⋯<aN=b,
记: αi=α∣∣∣∣∣[ai−1,ai], Ci=αi([ai−1,ai]),若满足:
-
Ci 为光滑曲线,αi 为 Ci 的参数方程(i=1∼N)。
-
Ci 内部互不相交。
则称 C 为分段光滑曲线,α 为 C 的参数方程,并记 C=C1+C2+⋯+CN。
并定义 α′(t)=αi′(t), t∈(ai−1,ai),对于 α′(ai) 上的函数值可以任取,由于 α′ 只在有限多个点处间断,所以
L(Ci)=∫ai−1ai∣αi′∣dt=∫ai−1ai∣α′∣dt
由于折线可以分解成很多段光滑的曲线,所以折线就是分段光滑曲线,从而折线上的积分我们接下来也可以求解了。
定义6(分段光滑曲线的长度)
设 C⊂Rn,C 为分段光滑积分,可以分解为:C=C1+C2+⋯+CN,记
L(C)=i=1∑NL(Ci)
定理7(分段光滑曲线长度的积分形式)
设 C⊂Rn 为分段光滑曲线,α:[a,b]→C 为 C 的参数方程,则
L(C)=∫ab∣α′∣dt
利用一维积分的可加性即可证明。
第一型曲线积分
该定义是从物理问题引出的,也称 f 沿着曲线积分。
定义1(第一型曲线积分)
设 C⊂Rn 为光滑曲线,α:[a,b]→C 为 C 的参数方程。
f:C→R,设 π:a=t0<t1<⋯<tN=b 为 [a,b] 的分划,考虑和式
S=i=1∑Nf(ξi)L(Ci)
其中 Ci=α([ti−1,ti]), ξi∈Ci
如果 ∃I∈R,满足 ∀ε>0,∃δ>0,使当 Δπ⩽δ 时,∣S−I∣⩽ε, (∀ξi∈Ci),则称 Δπ→0limS 存在,并定义 Δπ→0limS=I,如果 Δπ→0limS 存在,记
∫Cfds=Δπ→0limS
称为 f 沿曲线 C 的积分,也可以记为 ∫Cf(x)ds,这里的 x 是 n 维向量。
注: ds 在这里是形式的记号,表示单位长度,如果曲线看做钢丝,将 f(x) 看做钢丝密度(单位长度上的质量),那么 ∫Cfds 就是整个钢丝的质量。
定理2(第一型曲线积分计算方法)
设 C⊂Rn 为光滑曲线,α:[a,b]→C 为 C 的参数方程,设 f:C→R 连续,则
∫Cfds=∫abf(α(t))∣α′(t)∣dt
思路: 和 定理4(弧长的积分形式) 证明方法类似,都是拆开以后,做差用三角不等式估计。
证明:
=⩽⩽⩽∣∣∣∣∣∣S−∫abf(α(t))∣α′(t)∣dt∣∣∣∣∣∣∣∣∣∣∣∣i=1∑Nf(α(ti))∫ti−1ti∣α′(t)∣dt−i=1∑N∫ti−1tif(α(t))∣α′(t)∣dt∣∣∣∣∣∣i=1∑N∣∣∣∣∣∫ti−1ti(f(α(ti))−f(α(t)))∣α′(t)∣dt∣∣∣∣∣i=1∑N∫ti−1ti∣f(α(ti))−f(α(t))∣⋅∣α′(t)∣dtL(C)⋅ω(Δπ)→0
其中 ω(Δπ)=∣t−s∣⩽Δπsup∣f(α(t))−f(α(s))∣,当 Δπ→0 时, ω(Δπ)→0。
QED
例一(二维函数图像上的积分)
函数图像的定义和 例二 - 二维函数图像的长度 一致,设 g:C→R 连续,则
∫Cgds=∫abg(x,f(x))1+∣f′(x)∣2dx
不难发现,令 g=1,则 ∫Cds=L(C)。
由于第一型曲线积分 ⟺ 一元函数的积分,所以它有积分的众多性质,比如
定理3(保号性和线性性)
设 C⊂Rn 为光滑曲线,f,g:C→R 连续。
-
如果 f⩾0,则 ∫Cfds⩾0,“=” 成立当且仅当 f≡0。
-
如果 k,l∈R,则 ∫C(kf+lg)ds=k∫Cfds+l∫Cgds。
对于分段光滑曲线同样可以定义 f 在其上的积分。
定义4(分段曲线上的积分)
设 C 为分段光滑曲线,C=C1+C2+⋯+CN,设 f:C→R 连续,记
∫Cfds=i=1∑N∫Cifds
由于 f∘α 在 [a,b] 上只有有限个间断点,所以
∫Cfds=∫abf(α(t))∣α′(t)∣dt
定理5(三种变换)
设 Q∈Rn×n 为正交阵,r>0,v∈Rn,记 T:Rn→Rn,Tx=rQx+v,则
∫T(C)f(x)ds=r∫Cf(Tx)ds
Q 代表正交变换(旋转和对称);
r 代表伸缩变换( 注: 是整体伸缩,不能对某一维伸缩);
v 代表平移变换。
思路: 先写出 T(C) 的参数方程 β,然后对其求解,最后再转换回 α,最终回到 C 上。
证明: 设 C 的参数方程为 α:[a,b]→C,则 T(C)={rQα(t)+v:t∈[a,b]},
令 β(t)=rQα(t)+v, (t∈[a,b]),则 β 为 T(C) 的参数方程,于是
∫T(C)f(x)ds==逆向使用定理2=∫abf(β(t))∣β′(t)∣dt r∫abf(rQα(t)+v)∣α′(t)∣dt r∫Cf(rQx+v)ds r∫Cf(T(x))ds
QED
例一
∂Br(x0)={x∈R2:∣x−x0∣=r},则
y=x+x0x=rz∫∂Br(x0)f(y)ds ∫∂Brf(x+x0)ds r∫∂B1f(rz+x0)ds
例二
C={(x,y,z)∈R3:x2+y2+z2=a2,x+y+z=0},计算下列积分:
-
∫Cx2ds
-
∫Cxyds
-
∫Cxyzds
解:
1.∫Cx2ds=∫Cy2ds=∫Cz2ds=31∫C(x2+y2+z2)ds=3a2L(C)=32πa32.∫Cxyds=∫Cxzds=∫Cyzds=61∫C((x+y+z)2−x2−y2−z2)ds=−6a2L(C)=−3πa33.∫Cxyzds做对称变换xyz=−x=−y=−z−∫Cxyzds⇒∫Cxyzds=0
我们现在再回去看多元积分变量代换中的极坐标变换 note4 - 对坐标变换的思考,不难发现,这部分其实就是
∫02πf(rcosθ,rsinθ)rdθ=∫∂Brfds
所以圆盘上的积分也可以写做:
∫BR(x0)fdx=∫0R{∫∂Br(x0)fds}dr
结合这张图就更容易理解原因了。
