mAP(mean Average Precision) 指标笔记
最新更新于: 2026年3月16日上午10点16分
mAP是目标识别中常用的指标,下面介绍其具体计算方法,包含这几个部分:召回率、精度、准确率、PR曲线、AUC。
召回率、精度、准确率
这三个参数是传统二分类问题中所涉及的,用于评价二分类模型的性能。而目标识别问题也可以视为一个二分类问题,我们将图像中所有预测出的识别框都视为正例,其他所有的可能预测框都为负例,所以数据集中负例的数量将是无穷,但是没事,我们的指标中不会用到负例。
假设我们有一个二分类模型,对于数据集中的每个样本,模型给出一个对应的预测,我们将预测的结果分为以下四个类别:
- TP/FP (True/False Positive):正确/错误 预测为正例的样本数目。
- TN/FN (True/False Negative):正确/错误 预测为负例的样本数目。
我们不难发现这两个性质: 为数据集中全部正例数目, 为数据集中全部负例数目,整个数据集大小为 。
如下定义召回率(Recall),精度(Precision)和准确率(Accuracy):
目标识别问题
从二分类问题上看
在目标识别问题中,由于模型给出的预测框都可以认为是正例,所以 。在该问题下精度和准确率相同,即 ,召回率重新定义为 ,其中 表示整个数据集中真实框的数目(和二分类中的 相同)。
正例的确定方法
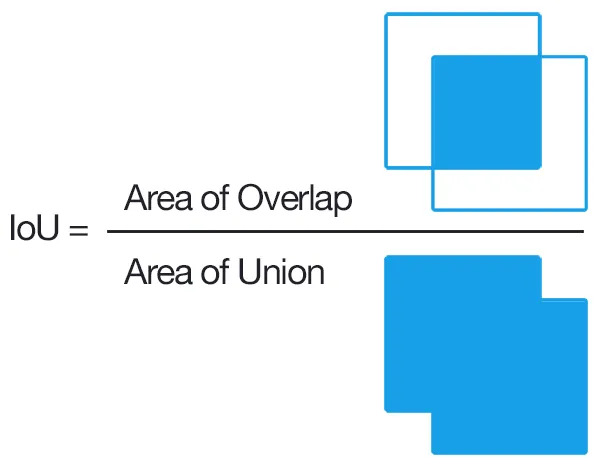
在目标识别问题中,如果确定一个识别框是正确的呢?我们需要引入两个边界框的IOU(Intersection over Union)概念,IOU定义为两个框的相交面积除以两个框并起来的面积,如下所示:
我们通过如下两步判断一个置信度为 的预测框 是否是预测正确的,假设该图像中包含 个检测框:
- 在数据集中找到与 有最大IOU的真实框,记为 ,当IOU大于给定阈值 时,进行下一步。
- 在当前图像预测出的 个检测框中,若 满足 ,都 使得 (没有另一个更大置信度的预测框和当前预测框抢真实框)
如果当前预测框 满足上述两个条件,则属于TP(正确预测的正例),否则为FP(错误预测的正例)。
PR曲线
我们将全部预测框按照置信度从大到小排序,逐一在坐标系上描点,对于描的第 个点,考虑预测框中前 大置信度的框所计算得到的精度 、召回率 ,在坐标系上绘制点 ,最后将点按照绘制顺序依次连接,即为PR曲线。不难发现, 单调递增。

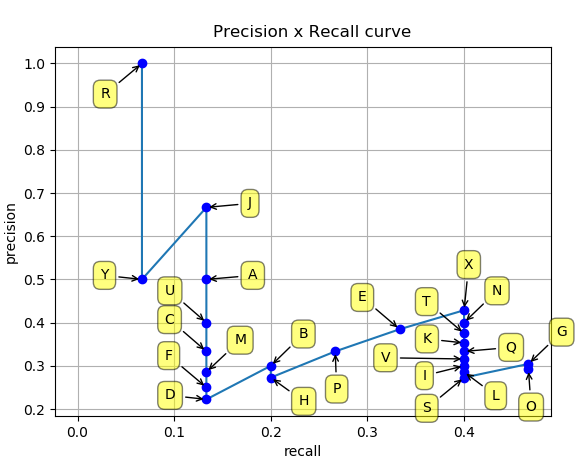
如上图所示,左图将预测框编号为从A~Y,按照置信度从大到小排序后,逐一计算累计精度和召回率,绘制在右图中并连接,即可得到PR曲线。
AP及mAP
AP指标(Average Percision)就是对精度的平均,通常用PR曲线下面积AUC(Area Under Curve)来表示。
mAP指标(mean Average Percision)就是基于类别对AP值进行平均,假设边界框总共 个类别,对于第 个类别,我们可以在固定的IOU阈值 下,计算出对应的AP值,记为 ,则mAP定义为
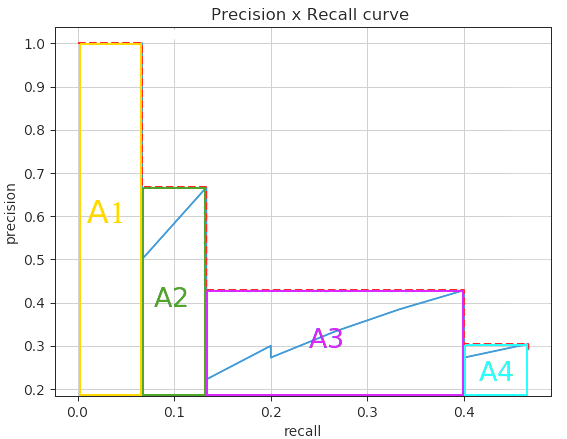
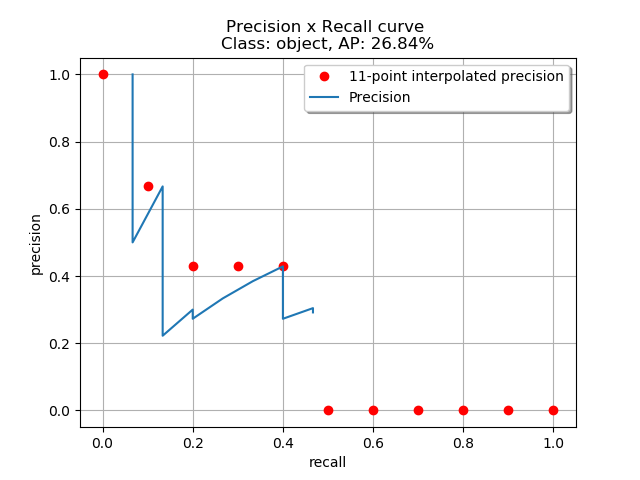
如下图所示,左图表示全部的AUC曲线下面积,右图表示使用11个插值点计算得到的估计值。(值得注意的是,曲线下面积是每个点的右侧最高值进行估计得到的,所以算出的结果比真实曲线下面积更大一些)
最后再总结一下,对于一个目标识别模型,给定一个数据集和一个IOU阈值 (用于判断预测框是否预测正确),我们就对每个类别 求出 ,然后平均求得 值。
COCO mAP
那么我们是不是还要问 取值是多少?不难看出,当 趋近于 时,当预测框准确预测时的要求更高,通常我们取 种不同的 ,分别为 ,步长为 ,设由阈值 算出的mAP记为 或 ,则COCO数据集的mAP评测指标为
常用的mAP预测指标还有 和 。
代码实现
- 用NMS对模型预测出的重复框进行筛选。
- 对每张图中所有预测框,分别计算10种不同IOU阈值下,每个预测框是否为正确的正例(TP, True Positive)
- 将所有图片的所有预测框以及在不同IOU阈值下计算的TP值进行合并。
- 对每个类别 ,统计数据集中属于类别 的真实框数目 ,计算不同置信度下的累计TP,FP值。
- 对每个类别 ,分别求出对应累计置信度下的精度、召回率(此处可以求出 和 分别表示在所有置信度大于 的预测框,在 IOU阈值下的精度召回率)。
- 最后对10个不同IOU阈值求出离散的PR曲线,用101点插值(COCO)或11点插值(PASCAL VOC),对曲线下面积AUC进行估计,从而得到 ,从而求出 。
计算AP值的核心代码如下,参考 YOLOv4官方代码:
def ap_per_class(tp, conf, pcls, tcls):
"""
Compute AP for each class in `np.unique(tcls)`.
Args:
tp: True positive of the predicted bounding boxes. [shape=(N,10) or (N,1)]
conf: Confidence of the predicted bounding boxes. [shape=(N,)]
pcls: Class label of the predicted bounding boxes. [shape=(N,)]
tcls: Class label of the target bounding boxes. [shape=(M,)]
Return:
p: Precision for each class with confidence bigger than 0.1. [shape=(Nc,tp.shape[1])]
r: Recall for each class with confidence bigger than 0.1. [shape=(Nc,tp.shape[1])]
ap: Average precision for each class with different iou thresholds. [shape=(Nc,tp.shape[1])]
f1: F1 coef for each class with confidence bigger than 0.1. [shape=(Nc,)]
ucls: Class labels after being uniqued. [shape=(Nc,)]
"""
sort_i = np.argsort(-conf)
tp, conf, pcls = tp[sort_i], conf[sort_i], pcls[sort_i]
ucls = np.unique(tcls)
shape = (len(ucls), tp.shape[1])
ap, p, r = np.zeros(shape), np.zeros(shape), np.zeros(shape)
pr_score = 0.1
for i, cls in enumerate(ucls):
idx = pcls == cls
# number of predict and target boxes with class `cls`
n_p, n_t = idx.sum(), (tcls==cls).sum()
if n_p == 0: continue
fpc = (1-tp[idx]).cumsum(0) # cumulate false precision
tpc = tp[idx].cumsum(0) # cumulate true precision
recall = tpc / n_t
r[i] = np.interp(-pr_score, -conf[idx], recall[:,0]) # conf[idx] decrease
precision = tpc / (tpc + fpc)
p[i] = np.interp(-pr_score, -conf[idx], precision[:,0])
for j in range(tp.shape[1]):
ap[i,j] = compute_ap(recall[:,j], precision[:,j])
f1 = 2 * p * r / (p + r + 1e-5)
return p, r, ap, f1, ucls.astype(np.int32)
def compute_ap(recall, precision, mode='interp'):
"""
Compute the average precision (AP) by the area under the curve (AUC) \
of the Recall x Precision curve.
Args:
recall: Recall of the predicted bounding boxes. [shape=(N,)]
precision: Precision of the predicted bounding boxes. [shape=(N,)]
mode: The mode of calculating the area. ['continue' or 'interp']
interp: 101-point interpolation (COCO: https://cocodataset.org/#detection-eval).
continue: all the point where `recall` changes.
Return:
ap: The area under the `recall` x `precision` curve.
"""
# Add sentinel values to begin and end
r = np.concatenate([(0.0,), recall, (min(recall[-1]+1e-5, 1.0),)])
p = np.concatenate([(0.0,), precision, (0.0,)])
# Compute the precision envelope
p = np.flip(np.maximum.accumulate(np.flip(p)))
if mode == 'interp':
x = np.linspace(0, 1, 101)
ap = np.trapz(np.interp(x, r, p), x)
elif mode == 'continue':
i = np.where(r[1:]!=r[:-1])[0]
ap = np.sum((r[i+1] - r[i]) * p[i]) # p[i] == p[i+1]
return ap