MID-360 + ROS2 + FAST LIO2建图
最新更新于: 2025年6月3日上午10点51分
软硬件型号
- Ubuntu(24.04) + Docker
- Docker - ROS2 Humble: Docker镜像下载
- Livox mid-360 + 三分数据线(DC电源线, 网线, 多功能数据线)
- 9~27V DC电源 + (接线端子/直接焊DC电源线和TX接口)
- 带有网口的主机
Livox SDK2 + ROS2驱动安装
安装Livox SDK2(3.2节)之前的步骤都可以跟上述教程走,安装ROS驱动:
cd ~
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
cd ws_livox/src/livox_ros_driver2
# --- 修改colcon编译选项 ---
vim build.sh
# 找到colcon命令执行处(61行), 在该行最后加上 --symlink-install
# 便于修改配置文件
colcon build ... --symlink-install
# --------------------------
# 安装ROS2 humble
./build.sh humble将Livox SDK2的动态链接库加入路径中
# For bash
vim ~/.bashrc
# For zsh
vim ~/.zshrc
# Add line:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/lib
# For bash
source ~/.bashrc
# For zsh
source ~/.zshrc修改~/ws_livox/src/livox_ros_driver2/config/MID360_config.json中主机ip(MID360['host_net_info']['cmd_data_ip'])和雷达ip(lidar_configs[0]['ip']),其中雷达ip192.168.1.1xx中的xx为雷达S/N码最后两位(可以在雷达包装盒或雷达侧面二维码下方找到,或者通过wireshark抓包获得,选择的有线端口进行抓包即可看到不停在发送的雷达信息),可以通过ping 192.168.1.1xx判断ip是否正确
vim ~/ws_livox/src/livox_ros_driver2/config/MID360_config.json
# 主机ip
"cmd_data_ip" : "192.168.1.50",
# 雷达ip
"ip" : "192.168.1.1xx",启动
cd ~/ws_livox
source install/setup.sh
ros2 launch livox_ros_driver2 rviz_MID360_launch.py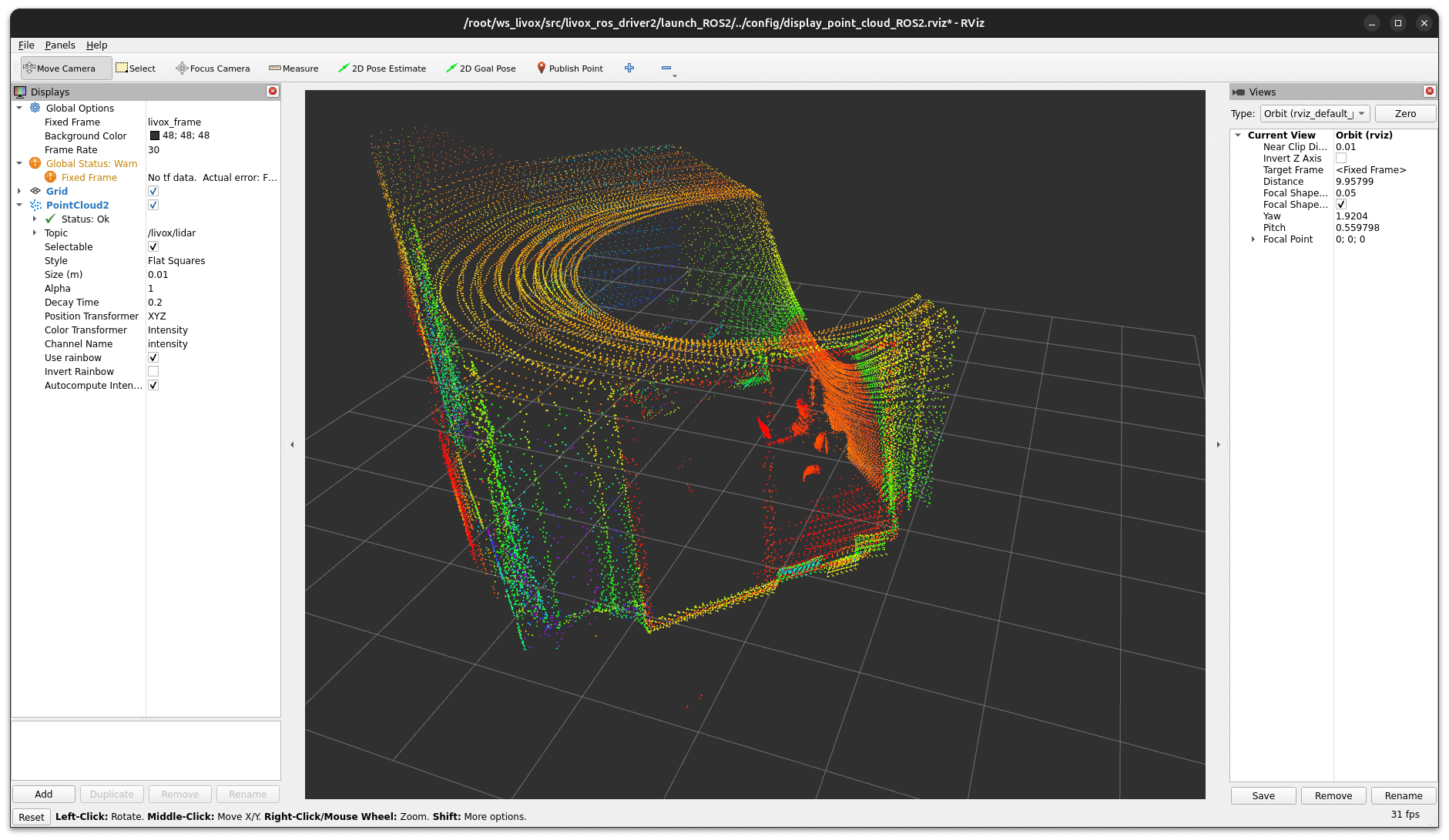
LAST LIO
使用LAST LIO的ROS2分支安装LAST LIO可以直接用MID-360做SLAM建图,参考FAST LIO-ROS2 #Build,编译安装完成后,就可以开始建图了:
ros2 launch livox_ros_driver2 msg_MID360_launch.py # 启动MID360通讯节点
ros2 launch fast_lio mapping.launch.py config_file:=mid360.yaml # 启动建图保存map
建立完成后的数据如果想要保存下来,需要解开src/laserMapping.cpp文件中的516行下方的所有注释,重新编译。
再参考PCD file save将yaml配置文件中的pcd_save_en置为true(默认就是true)。
这样在关闭LAST_LIO建图时,就会默认保存当前图,到[FAST_LIO_WS]/PCD/scans.pcd,使用pcl_viewer scans.pcd可以查看点云图。(pcl_viewer使用sudo apt install pcl-tools安装)
| 酒店房间建图 | 道路建图 |
|---|---|
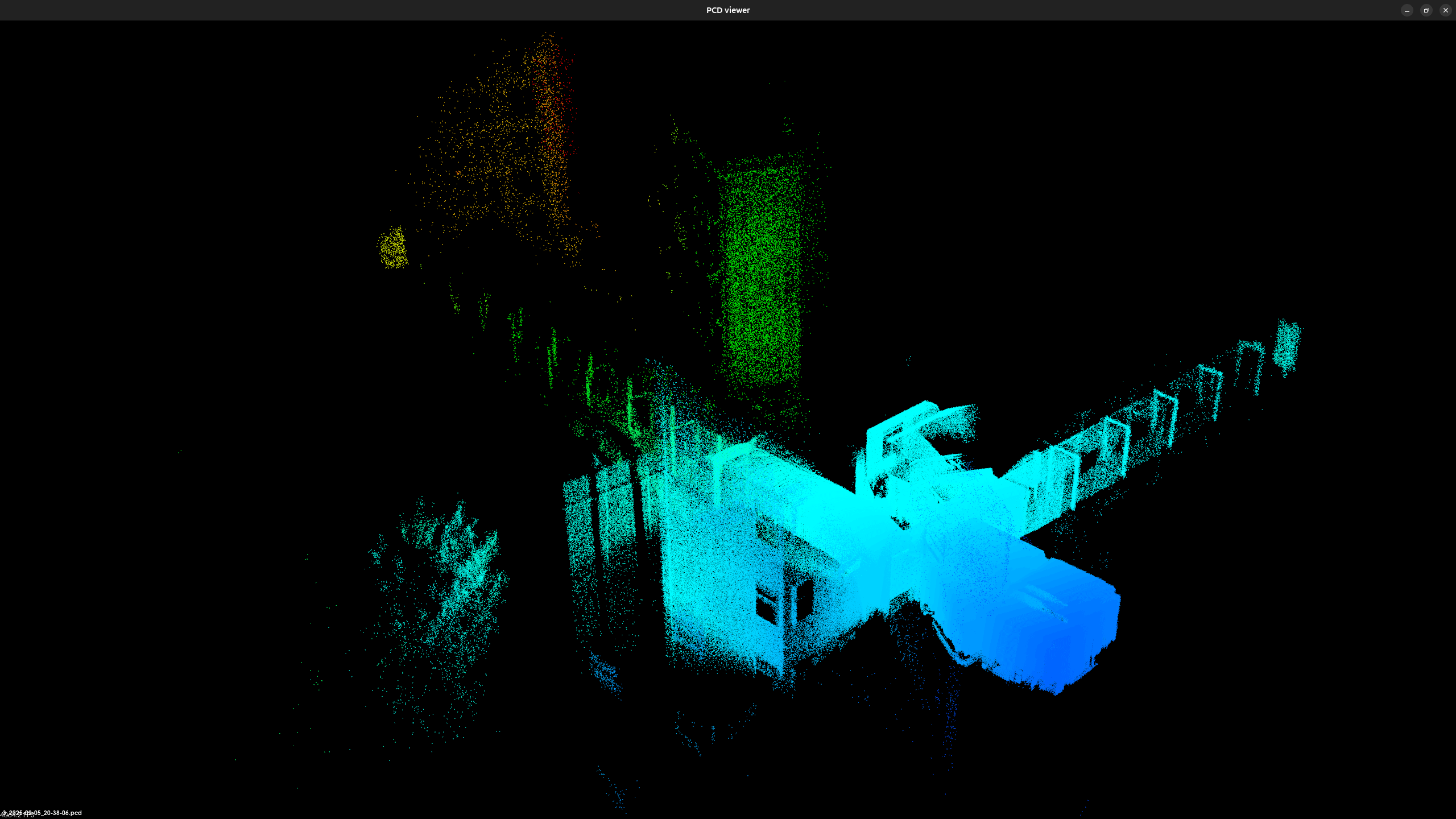 |
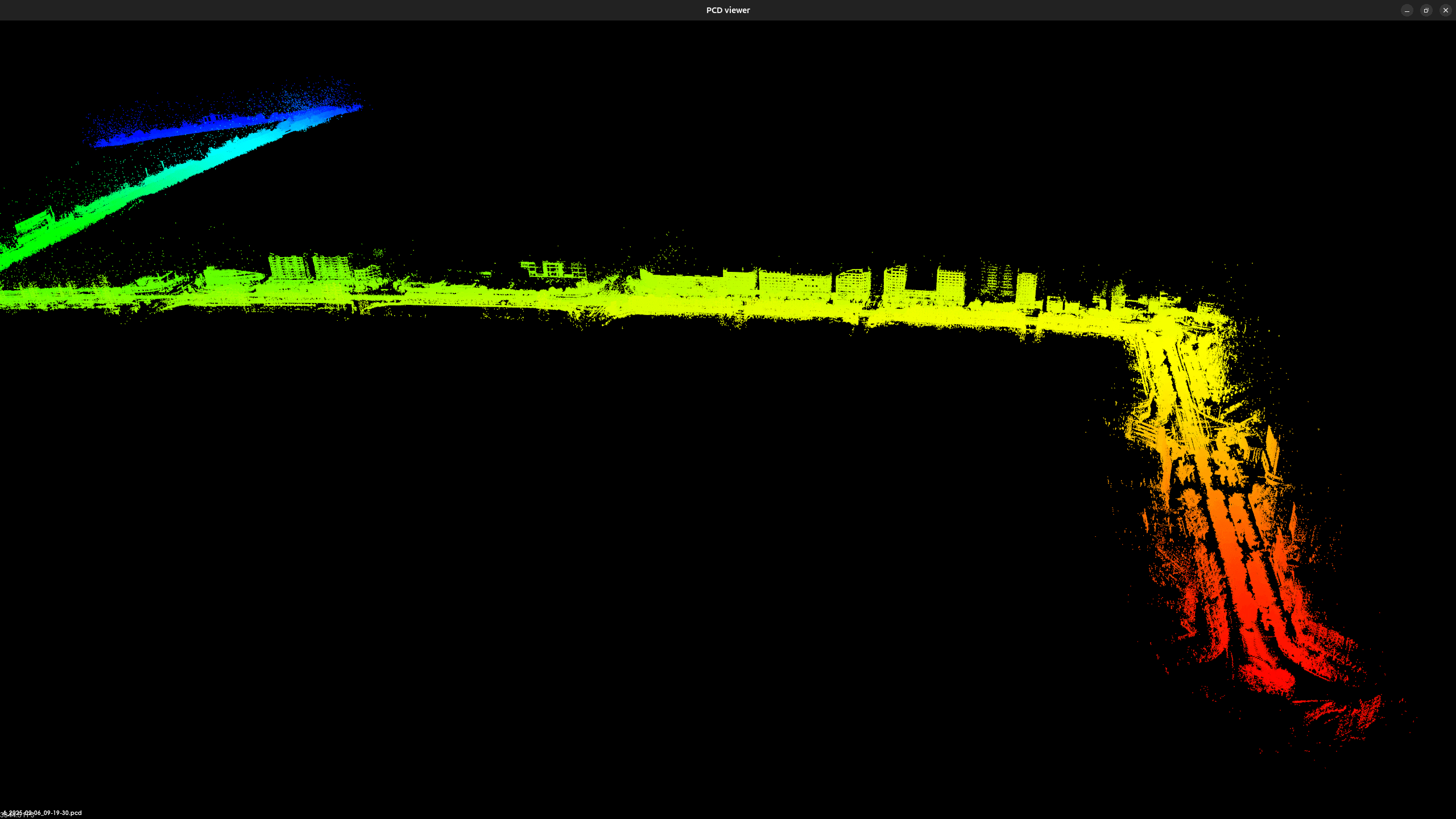 |
tips: 在
pcl_viewer中按h,可以在命令行中看到额外功能有哪些,例如数字1~9可以切换配色。