有刷直流电机控制笔记
最新更新于: 2025年1月24日下午1点47分
L298N控制参考: CSDN - L298N 电机驱动板 - 详细介绍
目标: 实现通过电脑点击按钮控制电机转速 (可以通过逻辑分析仪实时查看发送的PWM波形).
设备型号
- 开发板: TMS320F28069M (TI, 这个用Arduino, STM32都差不多)
- 驱动板: L298N (ST意法半导体, 淘宝5.8元)
- CAN控制器: GCAN USBCAN-Ⅱpro (广成科技)
- 直流有刷电机: 365马达电机 (淘宝6.57元)
- 电源: GS40006S30 (电压至少是6V就能用, 买几个电池串联下也行)
- 面包板 (有4路就能用)
- 一堆公对母, 公对公的杜邦线, 一些夹子
- USB拓展坞 (有3个口就行)
可选:
- 一个电源开关, 避免被电到了
- 电压表 (测下驱动板输出的电压大小)
- 逻辑分析仪: LA1010 (青岛金斯特)
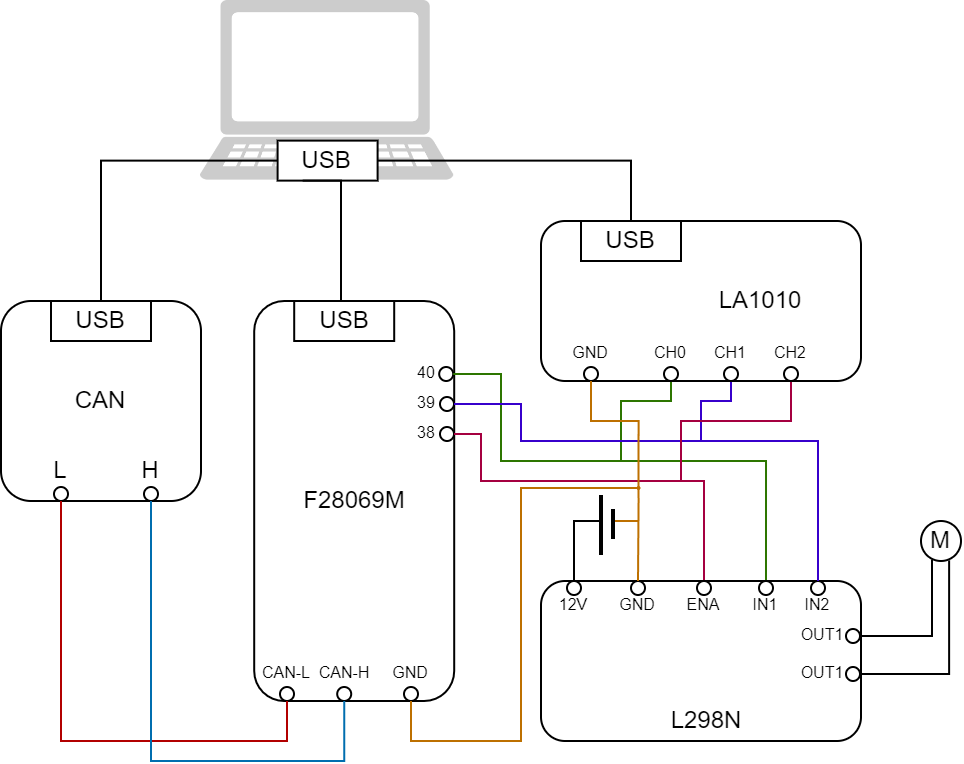
思路
用开发板的两个GPIO接口(pin40, pin39)控制驱动板输出电压的正反, 通过PWM波(pin38)控制电压大小(调速), 电脑通过CAN想开发板发送PWM占空比大小, 从而进行转速控制. (逻辑分析仪可有可无, 可以用来检测PWM型号的频率与占空比)
 |
 |
|---|---|
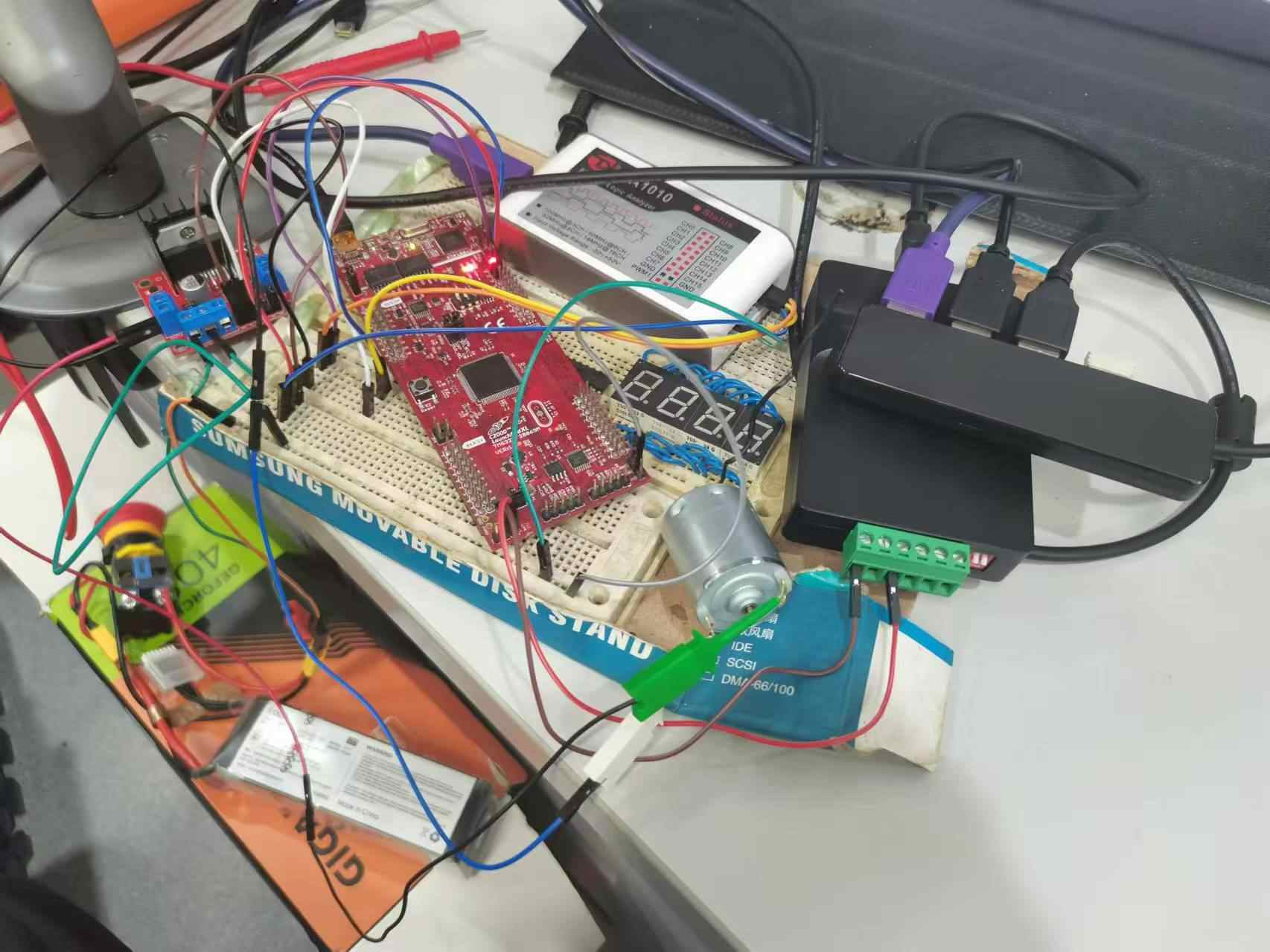
简化连线图 |
实际连线图 |
代码
开发板CCS代码
参考MyBlog - F28069M开发板笔记中GPIO, CAN, ePWM部分, 通过接收CAN传过来L值, 对CMPA即占空比进行调整从而控制转速, 需要注意, L298N接收的频率不能太高, 需要自己测试PWM频率大小 (这里频率仅有94Hz, 能够比较好的在电压3~6V下, 电机稳定工作, 如果频率太高, 虽然输出电压很高, 但是工作电流非常低, 可能导致低压无法工作的问题),
用到的链接库有:
${C2000_f28069m}/common/include${C2000_f28069m}/headers/include${C2000_math}/IQmath/c28/include${C2000_math}/FPUfastRTS/c28/include
其中环境变量在Resource -> Linked Resources中修改(c2000\表示在C2000的安装路径下)
C2000_f28069m = c2000\C2000Ware_5_02_00_00\device_support\f2806xC2000_math = c2000\C2000Ware_5_02_00_00\libraries\math
用到的相关代码文件有:
28069_RAM_lnk.cmd: 写到RAM中执行 (写Flash请用F28069M.cmd)F2806x_DefaultIsr.c, F2806x_GlobalVariableDefs.c, F2806x_Headers_nonBIOS.cmd: 基础文件F2806x_ECan.c: CAN通讯F2806x_EPwm.c: PWM波F2806x_PieCtrl.c, F2806x_PieVect.c: PIE中断处理F2806x_SysCtrl.c: 初始化内外设F2806x_usDelay.asm: 延迟函数DELAY_US
主程序main.c实现如下
#include "DSP28x_Project.h"
#define EPWM2_TBPRD 60000
#define MIN_CMPA 2000
#define MAX_CMPA 8000
Uint32 mailbox_read_low(Uint8 id) {
volatile struct MBOX *mailbox;
mailbox = &ECanaMboxes.MBOX0 + id;
return mailbox->MDL.all;
}
interrupt void ecan_receive_and_control_CA(void) {
ECanaRegs.CANRMP.all = 0x00000001; // receive flag
PieCtrlRegs.PIEACK.bit.ACK9 = 1;
Uint32 msg_l = mailbox_read_low(0);
if (msg_l >= MIN_CMPA && msg_l <= MAX_CMPA) {
EPwm2Regs.CMPA.half.CMPA = msg_l; // update duty
GpioDataRegs.GPBTOGGLE.bit.GPIO34 = 1; // toggle LED
}
}
void main(void) {
// Initialization
InitSysCtrl();
DINT;
IER = 0x0000;
IFR = 0x0000;
InitPieCtrl();
InitPieVectTable();
InitECanGpio();
InitECana();
InitEPwm2Gpio();
// ECanA receive
ECanaMboxes.MBOX0.MSGID.all = 0x00000000;
ECanaRegs.CANMD.all = 0x00000001;
ECanaRegs.CANME.all = 0x00000001;
EALLOW;
ECanaRegs.CANMIM.all = 0x00000001;
ECanaRegs.CANGIM.bit.I0EN = 1;
PieVectTable.ECAN0INTA = &ecan_receive_and_control_CA;
EDIS;
// GPIO0,1 and red LED
EALLOW;
GpioCtrlRegs.GPADIR.bit.GPIO0 = 1;
GpioCtrlRegs.GPADIR.bit.GPIO1 = 1;
GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1;
EDIS;
GpioDataRegs.GPASET.bit.GPIO0 = 1; // set 1
GpioDataRegs.GPACLEAR.bit.GPIO1 = 1; // set 0
// ePWM
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;
EPwm2Regs.TBPRD = EPWM2_TBPRD;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV4; // freq / 4
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV4; // freq / 4
EPwm2Regs.CMPA.half.CMPA = MIN_CMPA;
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET; // 1
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR; // 0
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
// Start Interrupt
IER |= M_INT9;
PieCtrlRegs.PIEIER9.bit.INTx5 = 1;
EINT;
ERTM;
}CAN通讯
这里对官网给的Python二次开发样例进行的修改, 注意Python版本为3.7 (因为Tkinter版本问题), 界面效果如下
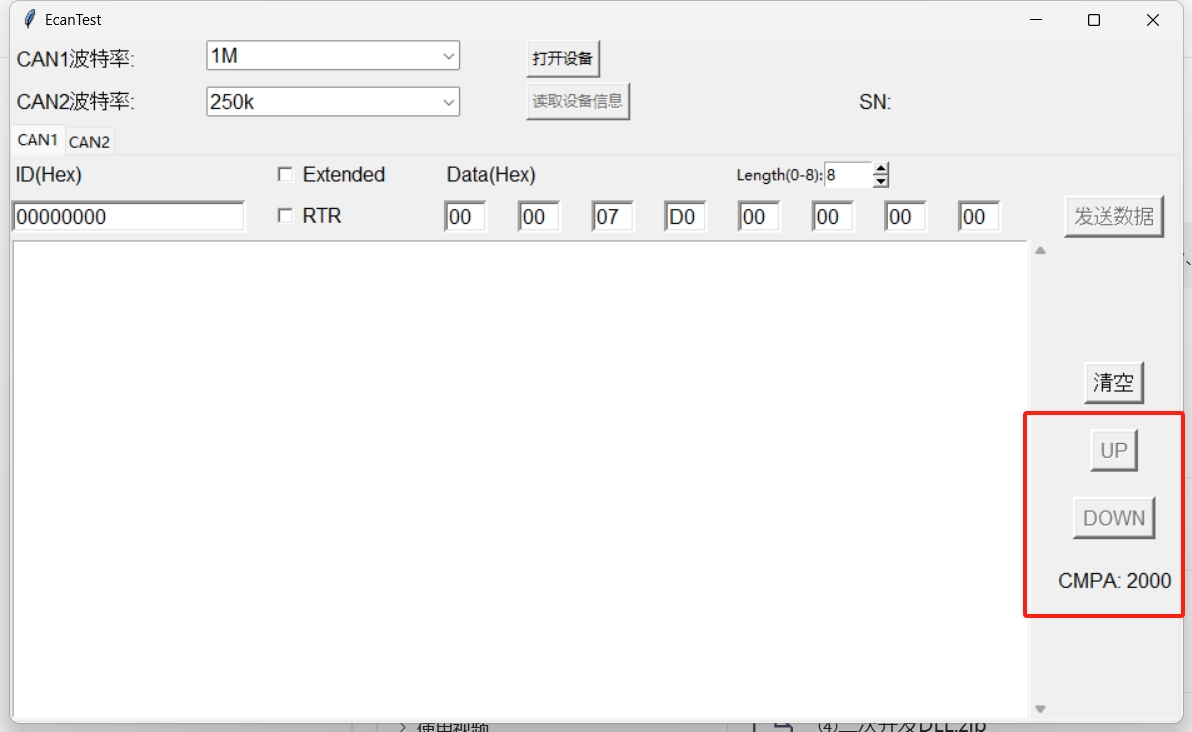
点击显/隐完整代码
# --*--utf8--*--
import ctypes
import tkinter.ttk
from ctypes import *
from tkinter import *
from tkinter.tix import *
from tkinter import ttk
from tkinter.messagebox import *
import os,sys
import threading
DevType = c_uint
cmpA_delta = 1000
cmpA_min = 2000
cmpA_max = 10000
'''
Device Type
'''
USBCAN1 = DevType(3)
USBCAN2 = DevType(4)
USBCANFD = DevType(6)
'''
Device Index
'''
DevIndex = c_uint(0) # 设备索引
'''
Channel
'''
Channel1 = c_uint(0) # CAN1
Channel2 = c_uint(1) # CAN2
'''
ECAN Status
'''
STATUS_ERR = 0
STATUS_OK = 1
'''
Device Information
'''
class BoardInfo(Structure):
_fields_ = [("hw_Version", c_ushort), # 硬件版本号,用16进制表示
("fw_Version", c_ushort), # 固件版本号,用16进制表示
("dr_Version", c_ushort), # 驱动程序版本号,用16进制表示
("in_Version", c_ushort), # 接口库版本号,用16进制表示
("irq_Num", c_ushort), # 板卡所使用的中断号
("can_Num", c_byte), # 表示有几路CAN通道
("str_Serial_Num", c_byte * 20), # 此板卡的序列号,用ASC码表示
("str_hw_Type", c_byte * 40), # 硬件类型,用ASC码表示
("Reserved", c_byte * 4)] # 系统保留
class CAN_OBJ(Structure):
_fields_ = [("ID", c_uint), # 报文帧ID
("TimeStamp", c_uint), # 接收到信息帧时的时间标识,从CAN控制器初始化开始计时,单位微秒
("TimeFlag", c_byte), # 是否使用时间标识,为1时TimeStamp有效,TimeFlag和TimeStamp只在此帧为接收帧时有意义。
("SendType", c_byte),
# 发送帧类型。=0时为正常发送,=1时为单次发送(不自动重发),=2时为自发自收(用于测试CAN卡是否损坏),=3时为单次自发自收(只发送一次,用于自测试),只在此帧为发送帧时有意义
("RemoteFlag", c_byte), # 是否是远程帧。=0时为数据帧,=1时为远程帧
("ExternFlag", c_byte), # 是否是扩展帧。=0时为标准帧(11位帧ID),=1时为扩展帧(29位帧ID)
("DataLen", c_byte), # 数据长度DLC(<=8),即Data的长度
("data", c_ubyte * 8), # CAN报文的数据。空间受DataLen的约束
("Reserved", c_byte * 3)] # 系统保留。
class INIT_CONFIG(Structure):
_fields_ = [("acccode", c_uint32), # 验收码。SJA1000的帧过滤验收码
("accmask", c_uint32), # 屏蔽码。SJA1000的帧过滤屏蔽码。屏蔽码推荐设置为0xFFFF FFFF,即全部接收
("reserved", c_uint32), # 保留
("filter", c_byte), # 滤波使能。0=不使能,1=使能。使能时,请参照SJA1000验收滤波器设置验收码和屏蔽码
("timing0", c_byte), # 波特率定时器0,详见动态库使用说明书7页
("timing1", c_byte), # 波特率定时器1,详见动态库使用说明书7页
("mode", c_byte)] # 模式。=0为正常模式,=1为只听模式,=2为自发自收模式。
import _ctypes
cwdx = os.getcwd()
class ECAN(object):
def __init__(self):
self.dll = cdll.LoadLibrary(cwdx + '/ECanVci64.dll')
if self.dll == None:
print("DLL Couldn't be loaded")
def OpenDevice(self, DeviceType, DeviceIndex):
try:
return self.dll.OpenDevice(DeviceType, DeviceIndex, 0)
except:
print("Exception on OpenDevice!")
raise
def CloseDevice(self, DeviceType, DeviceIndex):
try:
return self.dll.CloseDevice(DeviceType, DeviceIndex, 0)
except:
print("Exception on CloseDevice!")
raise
def InitCan(self, DeviceType, DeviceIndex, CanInd, Initconfig):
try:
return self.dll.InitCAN(DeviceType, DeviceIndex, CanInd, byref(Initconfig))
except:
print("Exception on InitCan!")
raise
def StartCan(self, DeviceType, DeviceIndex, CanInd):
try:
return self.dll.StartCAN(DeviceType, DeviceIndex, CanInd)
except:
print("Exception on StartCan!")
raise
def ReadBoardInfo(self, DeviceType, DeviceIndex):
try:
mboardinfo = BoardInfo()
ret = self.dll.ReadBoardInfo(DeviceType, DeviceIndex, byref(mboardinfo))
return mboardinfo, ret
except:
print("Exception on ReadBoardInfo!")
raise
def Receivce(self, DeviceType, DeviceIndex, CanInd, length):
try:
recmess = (CAN_OBJ * length)()
ret = self.dll.Receive(DeviceType, DeviceIndex, CanInd, byref(recmess), length, 0)
return length, recmess, ret
except:
print("Exception on Receive!")
raise
def Tramsmit(self, DeviceType, DeviceIndex, CanInd, mcanobj):
try:
# mCAN_OBJ=CAN_OBJ*2
# self.dll.Transmit.argtypes = [ctypes.c_uint32, ctypes.c_uint32, ctypes.c_uint32, POINTER(CAN_OBJ),
# ctypes.c_uint16]
return self.dll.Transmit(DeviceType, DeviceIndex, CanInd, byref(mcanobj), c_uint16(1))
except:
print("Exception on Tramsmit!")
raise
# 加载动态库
ecan = ECAN()
if hasattr(sys,'frozen'):
os.environ['PATH']=sys._MEIPASS+":"+os.environ['PATH']
root = Tk() # 初始化Tk()
root.title("EcanTest")
# root.geometry("800x1000")
root.resizable(width=TRUE, height=True)
# root.tk.eval('package require Tix')
musbcanopen = False
rec_CAN1 = 1
rec_CAN2 = 1
'''
读取数据
'''
def ReadCAN():
global musbcanopen, rec_CAN1, rec_CAN2
if (musbcanopen == True):
scount = 0
while (scount < 50):
scount=scount+1
len, rec, ret = ecan.Receivce(USBCAN2, DevIndex, Channel1, 1)
if (len > 0 and ret == 1):
mstr = "Rec: " + str(rec_CAN1)
rec_CAN1 = rec_CAN1 + 1
if rec[0].TimeFlag == 0:
mstr = mstr + " Time: "
else:
mstr = mstr + " Time:" + hex(rec[0].TimeStamp).zfill(8)
if rec[0].ExternFlag == 0:
mstr = mstr + " ID:" + hex(rec[0].ID).zfill(3) + " Format:Stand "
else:
mstr = mstr + " ID:" + hex(rec[0].ID).zfill(8) + " Format:Exten "
if rec[0].RemoteFlag == 0:
mstr = mstr + " Type:Data " + " Data: "
for i in range(0, rec[0].DataLen):
mstr = mstr + hex(rec[0].data[i]).zfill(2) + " "
else:
mstr = mstr + " Type:Romte " + " Data: Remote Request"
if listreadcan1.size() > 1000:
listreadcan1.delete(0, END)
listreadcan1.insert("end", mstr)
listreadcan1.see(listreadcan1.size())
len2, rec2, ret2 = ecan.Receivce(USBCAN2, DevIndex, Channel2, 1)
if (len2 > 0 and ret2 == 1):
mstr = "Rec: " + str(rec_CAN2)
rec_CAN2 = rec_CAN2 + 1
if rec2[0].TimeFlag == 0:
mstr = mstr + " Time: "
else:
mstr = mstr + " Time:" + hex(rec2[0].TimeStamp).zfill(8)
if rec2[0].ExternFlag == 0:
mstr = mstr + " ID:" + hex(rec2[0].ID).zfill(3) + " Format:Stand "
else:
mstr = mstr + " ID:" + hex(rec2[0].ID).zfill(8) + " Format:Exten "
if rec2[0].RemoteFlag == 0:
mstr = mstr + " Type:Data " + " Data: "
for i in range(0, rec2[0].DataLen):
mstr = mstr + hex(rec2[0].data[i]).zfill(2) + " "
else:
mstr = mstr + " Type:Romte " + " Data: Remote Request"
if listreadcan2.size() > 1000:
listreadcan2.delete(0, END)
listreadcan2.insert("end", mstr)
listreadcan2.see(listreadcan2.size())
t = threading.Timer(0.03, ReadCAN)
t.start()
t = threading.Timer(0.03, ReadCAN)
# python调用动态库默认参数为整型
def caninit():
global musbcanopen, t, rec_CAN1, rec_CAN2
if (musbcanopen == False):
initconfig = INIT_CONFIG()
initconfig.acccode = 0 # 设置验收码
initconfig.accmask = 0xFFFFFFFF # 设置屏蔽码
initconfig.filter = 0 # 设置滤波使能
mbaudcan1 = baudvaluecan1.get()
mbaudcan2 = baudvaluecan2.get()
# 打开设备
if (ecan.OpenDevice(USBCAN2, DevIndex) != STATUS_OK):
tkinter.messagebox.showinfo("ERROR", "OpenDevice Failed!")
return
initconfig.timing0, initconfig.timing1 = getTiming(mbaudcan1)
initconfig.mode = 0
# 初始化CAN1
if (ecan.InitCan(USBCAN2, DevIndex, Channel1, initconfig) != STATUS_OK):
tkinter.messagebox.showinfo("ERROR", "InitCan CAN1 Failed!")
ecan.CloseDevice(USBCAN2, DevIndex)
return
# 初始化CAN2
initconfig.timing0, initconfig.timing1 = getTiming(mbaudcan2)
if (ecan.InitCan(USBCAN2, DevIndex, Channel2, initconfig) != STATUS_OK):
tkinter.messagebox.showinfo("ERROR", "InitCan CAN2 Failed!")
ecan.CloseDevice(USBCAN2, DevIndex)
return
if (ecan.StartCan(USBCAN2, DevIndex, Channel1) != STATUS_OK):
tkinter.messagebox.showinfo("ERROR", "StartCan CAN1 Failed!")
ecan.CloseDevice(USBCAN2, DevIndex)
return
if (ecan.StartCan(USBCAN2, DevIndex, Channel2) != STATUS_OK):
tkinter.messagebox.showinfo("ERROR", "StartCan CAN2 Failed!")
ecan.CloseDevice(USBCAN2, DevIndex)
return
musbcanopen = True
rec_CAN1 = 1
rec_CAN2 = 1
btopen.configure(text="关闭设备")
btreadinfo.configure(state='normal')
bt_send_CAN1.configure(state='normal')
bt_send_CAN2.configure(state='normal')
bt_up.configure(state='normal')
bt_down.configure(state='normal')
bt_loop.configure(state='normal')
t = threading.Timer(0.03, ReadCAN)
t.start()
else:
musbcanopen = False
ecan.CloseDevice(USBCAN2, DevIndex)
btopen.configure(text="打开设备")
lbsn.configure(text="SN:")
btreadinfo.configure(state='disabled')
bt_send_CAN1.configure(state='disabled')
bt_send_CAN2.configure(state='disabled')
bt_up.configure(state='disabled')
bt_down.configure(state='disabled')
bt_loop.configure(state='disabled')
'''
读取SN号码
'''
def readmess():
global musbcanopen
if (musbcanopen == False):
tkinter.messagebox.showinfo("ERROR", "请先打开设备")
else:
mboardinfo, ret = ecan.ReadBoardInfo(USBCAN2, DevIndex) # 读取设备信息需要在打开设备后执行
if ret == STATUS_OK:
mstr = ""
for i in range(0, 10):
mstr = mstr + chr(mboardinfo.str_Serial_Num[i]) # 结构体中str_Serial_Num内部存放存放SN号的ASC码
lbsn.configure(text="SN:" + mstr)
else:
lbsn.configure(text="Read info Fault")
def getTiming(mbaud):
if mbaud == "1M":
return 0, 0x14
if mbaud == "800k":
return 0, 0x16
if mbaud == "666k":
return 0x80, 0xb6
if mbaud == "500k":
return 0, 0x1c
if mbaud == "400k":
return 0x80, 0xfa
if mbaud == "250k":
return 0x01, 0x1c
if mbaud == "200k":
return 0x81, 0xfa
if mbaud == "125k":
return 0x03, 0x1c
if mbaud == "100k":
return 0x04, 0x1c
if mbaud == "80k":
return 0x83, 0xff
if mbaud == "50k":
return 0x09, 0x1c
def clearcan1():
listreadcan1.delete(0, END)
def clearcan2():
listreadcan2.delete(0, END)
def message_up():
msg = calc_message()
msg += cmpA_delta
update_data(msg)
sendcan1()
def message_down():
msg = calc_message()
msg -= cmpA_delta
update_data(msg)
sendcan1()
def message_loop():
import time
while(1):
print("HI")
for _ in range(4):
print(_)
message_up()
time.sleep(2)
for _ in range(4):
message_down()
time.sleep(2)
def calc_message():
num = ""
for i in range(4):
num += eval(f"e_Data{i}_CAN1.get()")
num = int(num, 16)
return num
def update_lb_cmpA():
msg = calc_message()
lb_cmpA.config(text=f"CMPA: {msg}")
def update_data(target_msg):
target_msg = max(min(target_msg, cmpA_max), cmpA_min)
msg = hex(target_msg)[2:]
msg = '0' * (8 - len(msg)) + msg
for i in range(4):
eval(f"Data{i}_CAN1.set(msg[i*2:i*2+2])")
update_lb_cmpA()
def sendcan1():
global musbcanopen
if (musbcanopen == False):
tkinter.messagebox.showinfo("ERROR", "请先打开设备")
else:
canobj = CAN_OBJ()
canobj.ID = int(e_ID_CAN1.get(), 16)
canobj.SendType=1
canobj.DataLen = int(ct_Length_CAN1['value'])
canobj.data[0] = int(e_Data0_CAN1.get(), 16)
canobj.data[1] = int(e_Data1_CAN1.get(), 16)
canobj.data[2] = int(e_Data2_CAN1.get(), 16)
canobj.data[3] = int(e_Data3_CAN1.get(), 16)
canobj.data[4] = int(e_Data4_CAN1.get(), 16)
canobj.data[5] = int(e_Data5_CAN1.get(), 16)
canobj.data[6] = int(e_Data6_CAN1.get(), 16)
canobj.data[7] = int(e_Data7_CAN1.get(), 16)
canobj.RemoteFlag = rtr_CAN1.get()
canobj.ExternFlag = ext_CAN1.get()
i=0
while(ecan.Tramsmit(USBCAN2, DevIndex, Channel1, canobj)==0)&(i<40):
i=i+1
print(i)
def sendcan2():
global musbcanopen
if (musbcanopen == False):
tkinter.messagebox.showinfo("ERROR", "请先打开设备")
else:
canobj = CAN_OBJ()
canobj.ID = int(e_ID_CAN2.get(), 16)
canobj.DataLen = int(ct_Length_CAN2['value'])
canobj.data[0] = int(e_Data0_CAN2.get(), 16)
canobj.data[1] = int(e_Data1_CAN2.get(), 16)
canobj.data[2] = int(e_Data2_CAN2.get(), 16)
canobj.data[3] = int(e_Data3_CAN2.get(), 16)
canobj.data[4] = int(e_Data4_CAN2.get(), 16)
canobj.data[5] = int(e_Data5_CAN2.get(), 16)
canobj.data[6] = int(e_Data6_CAN2.get(), 16)
canobj.data[7] = int(e_Data7_CAN2.get(), 16)
canobj.RemoteFlag = rtr_CAN2.get()
canobj.ExternFlag = ext_CAN2.get()
ecan.Tramsmit(USBCAN2, DevIndex, Channel2, canobj)
lb1 = Label(root, text="CAN1波特率:", bd=3, font=("Arial", 12))
lb1.grid(row=1, column=0, padx=1, pady=1, sticky='w')
lb2 = Label(root, text="CAN2波特率:", bd=3, font=("Arial", 12))
lb2.grid(row=2, column=0, padx=1, pady=1, sticky='w')
lbsn = Label(root, text="SN:", bd=3, font=("Arial", 12), width=30)
lbsn.grid(row=2, column=3, padx=5, pady=5, sticky='w')
tabcontrol = ttk.Notebook(root)
tab1 = ttk.Frame(tabcontrol)
tab2 = ttk.Frame(tabcontrol)
tabcontrol.grid(row=3, columnspan=5, sticky='nw')
tabcontrol.add(tab1, text="CAN1")
tabcontrol.add(tab2, text="CAN2")
baudvaluecan1 = StringVar()
baudvaluecan1.set("1M")
baudvaluecan2 = StringVar()
baudvaluecan2.set("250k")
baudvalues = ["1M", "800k", "666k", "500k", "400k", "250k", "200k", "125k", "100k", "80k", "50k"]
can1com = tkinter.ttk.Combobox(master=root, state="readonly", font=("Arial", 12), textvariable=baudvaluecan1,
values=baudvalues)
can1com.grid(row=1, column=1, padx=1, pady=1, sticky='nw')
can2com = tkinter.ttk.Combobox(master=root, state="readonly", font=("Arial", 12), textvariable=baudvaluecan2,
values=baudvalues)
can2com.grid(row=2, column=1, padx=1, pady=1, sticky='w')
btopen = Button(root, text="打开设备", command=caninit)
btopen.grid(row=1, column=2, padx=1, pady=1, sticky='w')
btreadinfo = Button(root, text="读取设备信息", command=readmess, state='disabled')
btreadinfo.grid(row=2, column=2, padx=1, pady=1, sticky='w')
lb_ID_CAN1 = Label(tab1, text="ID(Hex)", bd=3, font=("Arial", 12))
lb_ID_CAN1.grid(row=0, column=0, sticky='w')
e_ID_CAN1 = Entry(tab1, bd=3, font=("Arial", 12))
e_ID_CAN1.grid(row=1, column=0, sticky='w')
e_ID_CAN1.insert(0, "00000000")
ext_CAN1 = IntVar()
cb_Ext_CAN1 = Checkbutton(tab1, text="Extended", variable=ext_CAN1, bd=3, font=("Arial", 12))
cb_Ext_CAN1.grid(row=0, column=1, sticky='w')
rtr_CAN1 = IntVar()
cb_Rtr_CAN1 = Checkbutton(tab1, text="RTR", variable=rtr_CAN1, bd=3, font=("Arial", 12))
cb_Rtr_CAN1.grid(row=1, column=1, sticky='w')
ct_Length_CAN1 = Control(tab1, label='Length(0-8):', integer=True, max=8, min=0, value=8, step=1)
ct_Length_CAN1.grid(row=0, column=7, columnspan=4, sticky='w')
s1 = Scrollbar(tab1, orient=VERTICAL)
s1.grid(row=2, column=11,sticky='ns')
listreadcan1 = Listbox(tab1, font=("Arial", 12), height=20, width=90, yscrollcommand=s1.set)
listreadcan1.grid(row=2, column=0, columnspan=11, sticky='nw')
s1.config(command=listreadcan1.yview)
lb_Data_CAN1 = Label(tab1, text="Data(Hex)", bd=3, font=("Arial", 12))
lb_Data_CAN1.grid(row=0, column=3, columnspan=4, sticky='w')
Data0_CAN1 = StringVar()
e_Data0_CAN1 = Entry(tab1, textvariable=Data0_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data0_CAN1.grid(row=1, column=3, padx=2, pady=1, sticky='w')
Data0_CAN1.set('00')
Data1_CAN1 = StringVar()
e_Data1_CAN1 = Entry(tab1, textvariable=Data1_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data1_CAN1.grid(row=1, column=4, padx=2, pady=1, sticky='w')
Data1_CAN1.set('00')
Data2_CAN1 = StringVar()
e_Data2_CAN1 = Entry(tab1, textvariable=Data2_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data2_CAN1.grid(row=1, column=5, padx=2, pady=1, sticky='w')
Data2_CAN1.set('07')
Data3_CAN1 = StringVar()
e_Data3_CAN1 = Entry(tab1, textvariable=Data3_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data3_CAN1.grid(row=1, column=6, padx=2, pady=1, sticky='w')
Data3_CAN1.set('D0')
Data4_CAN1 = StringVar()
e_Data4_CAN1 = Entry(tab1, textvariable=Data4_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data4_CAN1.grid(row=1, column=7, padx=2, pady=1, sticky='w')
Data4_CAN1.set('00')
Data5_CAN1 = StringVar()
e_Data5_CAN1 = Entry(tab1, textvariable=Data5_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data5_CAN1.grid(row=1, column=8, padx=2, pady=1, sticky='w')
Data5_CAN1.set('00')
Data6_CAN1 = StringVar()
e_Data6_CAN1 = Entry(tab1, textvariable=Data6_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data6_CAN1.grid(row=1, column=9, padx=2, pady=1, sticky='w')
Data6_CAN1.set('00')
Data7_CAN1 = StringVar()
e_Data7_CAN1 = Entry(tab1, textvariable=Data7_CAN1, width=3, bd=3, font=("Arial", 12))
e_Data7_CAN1.grid(row=1, column=10, padx=2, pady=1, sticky='w')
Data7_CAN1.set('00')
bt_send_CAN1 = Button(tab1, text='发送数据', state='disabled', font=("Arial", 12), bd=3, command=sendcan1)
bt_send_CAN1.grid(row=1, column=12, padx=2, pady=1)
tab11 = ttk.Frame(tab1)
tab11.grid(row=2, column=12)
bt_clear_CAN1 = Button(tab11, text='清空', font=("Arial", 12), bd=3, command=clearcan1)
bt_clear_CAN1.grid(row=0, column=0, padx=2, pady=10)
bt_up = Button(tab11, text='UP', state='disabled', font=("Arial", 12), bd=3, command=message_up)
bt_up.grid(row=1, column=0, padx=2, pady=10)
bt_down = Button(tab11, text='DOWN', state='disabled', font=("Arial", 12), bd=3, command=message_down)
bt_down.grid(row=2, column=0, padx=2, pady=10)
bt_loop = Button(tab11, text='LOOP', state='disabled', font=("Arial", 12), bd=3, command=message_loop)
bt_loop.grid(row=4, column=0, padx=2, pady=10)
lb_cmpA = Label(tab11, text="CMPA:", bd=3, font=("Arial", 12))
lb_cmpA.grid(row=3, column=0, padx=2, pady=10)
update_lb_cmpA()
lb_ID_CAN2 = Label(tab2, text="ID(Hex)", bd=3, font=("Arial", 12))
lb_ID_CAN2.grid(row=0, column=0, sticky='w')
e_ID_CAN2 = Entry(tab2, bd=3, font=("Arial", 12))
e_ID_CAN2.grid(row=1, column=0, sticky='w')
e_ID_CAN2.insert(0, "00000001")
ext_CAN2 = IntVar()
cb_Ext_CAN2 = Checkbutton(tab2, text="Extended", variable=ext_CAN2, bd=3, font=("Arial", 12))
cb_Ext_CAN2.grid(row=0, column=1, sticky='w')
rtr_CAN2 = IntVar()
cb_Rtr_CAN2 = Checkbutton(tab2, text="RTR", variable=rtr_CAN2, bd=3, font=("Arial", 12))
cb_Rtr_CAN2.grid(row=1, column=1, sticky='w')
ct_Length_CAN2 = Control(tab2, label='Length(0-8):', integer=True, max=8, min=0, value=8, step=1)
ct_Length_CAN2.grid(row=0, column=7, columnspan=4, sticky='w')
s2 = Scrollbar(tab2, orient=VERTICAL)
s2.grid(row=2, column=11,sticky='ns')
listreadcan2 = Listbox(tab2, font=("Arial", 12), height=20, width=90, yscrollcommand=s2.set)
listreadcan2.grid(row=2, column=0, columnspan=11, sticky='nw')
s2.config(command=listreadcan2.yview)
lb_Data_CAN2 = Label(tab2, text="Data(Hex)", bd=3, font=("Arial", 12))
lb_Data_CAN2.grid(row=0, column=3, columnspan=4, sticky='w')
Data0_CAN2 = StringVar()
e_Data0_CAN2 = Entry(tab2, textvariable=Data0_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data0_CAN2.grid(row=1, column=3, padx=2, pady=1, sticky='w')
Data0_CAN2.set('00')
Data1_CAN2 = StringVar()
e_Data1_CAN2 = Entry(tab2, textvariable=Data1_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data1_CAN2.grid(row=1, column=4, padx=2, pady=1, sticky='w')
Data1_CAN2.set('01')
Data2_CAN2 = StringVar()
e_Data2_CAN2 = Entry(tab2, textvariable=Data2_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data2_CAN2.grid(row=1, column=5, padx=2, pady=1, sticky='w')
Data2_CAN2.set('02')
Data3_CAN2 = StringVar()
e_Data3_CAN2 = Entry(tab2, textvariable=Data3_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data3_CAN2.grid(row=1, column=6, padx=2, pady=1, sticky='w')
Data3_CAN2.set('03')
Data4_CAN2 = StringVar()
e_Data4_CAN2 = Entry(tab2, textvariable=Data4_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data4_CAN2.grid(row=1, column=7, padx=2, pady=1, sticky='w')
Data4_CAN2.set('04')
Data5_CAN2 = StringVar()
e_Data5_CAN2 = Entry(tab2, textvariable=Data5_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data5_CAN2.grid(row=1, column=8, padx=2, pady=1, sticky='w')
Data5_CAN2.set('05')
Data6_CAN2 = StringVar()
e_Data6_CAN2 = Entry(tab2, textvariable=Data6_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data6_CAN2.grid(row=1, column=9, padx=2, pady=1, sticky='w')
Data6_CAN2.set('06')
Data7_CAN2 = StringVar()
e_Data7_CAN2 = Entry(tab2, textvariable=Data7_CAN2, width=3, bd=3, font=("Arial", 12))
e_Data7_CAN2.grid(row=1, column=10, padx=2, pady=1, sticky='w')
Data7_CAN2.set('07')
bt_send_CAN2 = Button(tab2, text='发送数据', state='disabled', font=("Arial", 12), bd=3, command=sendcan2)
bt_send_CAN2.grid(row=1, column=12, padx=2, pady=1)
bt_clear_CAN2 = Button(tab2, text='清空', font=("Arial", 12), bd=3, command=clearcan2)
bt_clear_CAN2.grid(row=2, column=12, padx=2, pady=1)
root.mainloop()有刷直流电机控制笔记
https://wty-yy.xyz/posts/64702/