Ubuntu 本地及服务器安装 IsaacSim/Lab
最新更新于: 2026年3月3日晚上10点21分
2026.3.3:之前的方法是2024年的已经过时了,最新的版本已经到5.1,推荐直接使用pip或者uv安装方便快捷
IsaacSim 安装
官方给出三种安装方法,二进制、pip和docker,这里直接介绍最实用的方案,适用于后续IsaacLab使用,下面介绍IsaacSim 5.*的安装方法
最低要求:显卡RTX 3070以上,驱动支持CUDA 12.8以上
但是Ubuntu系统无法达到要求(至少Ubuntu 22.04以上),则在Docker容器中安装,使用Ubuntu 22.04镜像docker pull ubuntu:22.04启动即可,或者使用我的镜像docker pull wtyyy/ubuntu:22.04,如果对Docker不熟悉可以先参考Docker安装与常用命令,如果不再Docker中使用则跳过Docker安装部分,直接按照uv安装Python环境
docker启动命令如下,注意需要安装nvidia-container-toolkit,如果有nvidia_icd.json文件需要挂在到容器中,推荐将isaaclab环境的安装挂载到~/docker/isaaclab中
docker run -it --name ${USER} \
-e DISPLAY \
--gpus all \
-e NVIDIA_DRIVER_CAPABILITIES=all \
-e "__NV_PRIME_RENDER_OFFLOAD=1" \
-e "__GLX_VENDOR_LIBRARY_NAME=nvidia" \
-v "/tmp/.X11-unix:/tmp/.X11-unix" \
-v /usr/share/vulkan/icd.d/nvidia_icd.json:/usr/share/vulkan/icd.d/nvidia_icd.json:ro \
-v "${HOME}/docker/isaaclab/:/root/isaaclab" \
--net=host \
wtyyy/ubuntu:22.04 zsh环境中执行以下指令都没问题,就直接跟着官方教程安装pip版的IsaacSim和IsaacLab即可
nvidia-smi
xclock # 测试X11渲染
glxinfo | grep renderer # 查看X11驱动
vkcube # 测试vulkan渲染推荐使用uv安装env_isaaclab环境,比conda简单更快:
proxy_on # 打开代理
curl -LsSf https://astral.sh/uv/install.sh | sh # 安装uv
source ~/.zshrc # 或者 source ~/.bashrc
cd ~/docker/isaaclab
# 创建环境
uv venv --python 3.11 --seed env_isaaclab
source env_isaaclab/bin/activate
# 安装2.7版本的cu128的torch和torchvision
uv pip install -U torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu128
# 安装IsaacSim和IsaacLab
pip install isaaclab[isaacsim,all]==2.3.2.post1 --extra-index-url https://pypi.nvidia.com检查安装是否成功:
isaacsim如果使用vscode则需调用以下代码,生成vscode的python环境配置文件:
python -m isaaclab --generate-vscode-settingsIsaac Sim 本地安装

</div>
Isaac Sim 环境是曾经 Isaac Gym 的上位版本,他们都是用来做机器人仿真环境训练的,适合用于虚实迁移任务,特点为及其高效,因为仿真环境与训练的模型都是在 GPU 上完成。IsaacLab 则是通过 Python 语言将 Isaac Sim 中的环境创建为 Gym 接口,从而直接应用于强化学习算法中。
而 Isaac Sim 现在作为 Omniverse Platform 中的一部分,我们需要先安装 Omniverse 因此我们的安装顺序为
- Omniverse Launcher (Omniverse 可视化界面)
- Isaac Sim Compatibility Checker (检查电脑是否支持 Isaac Sim)
- 使用 Omniverse Launcher 安装一些基础包
- 使用 Omnvierse Launcher 安装 Isaac Sim
- IssaLab (配置使 Isaac Sim 成为 Python 中仿真环境接口)
在官方给出的安装教程中,只需完成 Isaac Sim Requirements 和 Workstation Installation 两步,对于 Python 的 Python Environment Installation,由于其对 Conda 环境中 Python 配置介绍不详细,因此我们按照 IssacLab 中方法进行配置更为方便!
安装 Omniverse Launcher
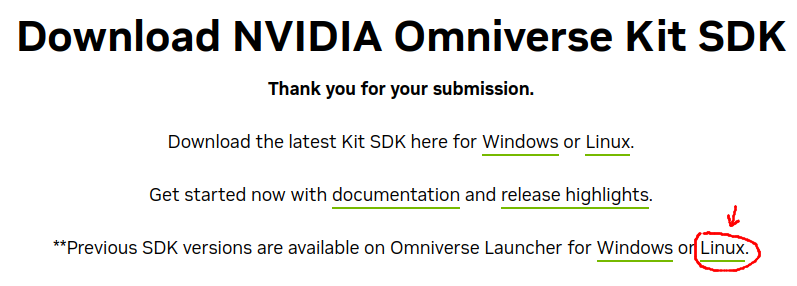
Omniverse Launcher 下载链接填写好你的信息就能下载了,最好注册一个 Nvidia 账号,这样可以保存你的填写的信息,选择 Linux 下载(我这里是第三行):
下载后我们可以得到一个 omniverse-launcher-linux.AppImage 软件,把这个软件放到一个固定的位置,因为第一次运行时会在菜单中创建当前位置的快捷方式。安装方法:进入到该文件夹下,执行下述代码开始安装
sudo chmod +x omniverse-launcher-linux.AppImage
# 如果你有 Clash 代理的话可以加上 --proxy-server={IP}:{PORT}
./omniverse-launcher-linux.AppImage --no-sandbox --proxy-server=127.0.0.1:7890安装完成omniverse后,第一次打开会让你选择Pkg和Cache的安装位置,默认位置即可,后续IsaacSim中会用到pkg位置。
安装 Isaac Sim
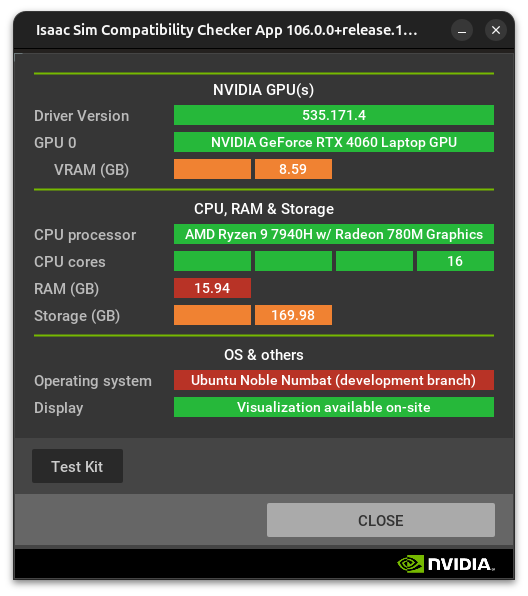
首先按照 Isaac Sim Compatibility Checker 给出的步骤安装 Compatibility Checker 对电脑的兼容性进行检查,只要显卡那一栏不是红的应该就没有问题(我的电脑检查结果如下左图所示)。
按照 Workstation Installation 在 Omniverse Launcher 中顺次安装 Cache, Nucleus 中的内容。
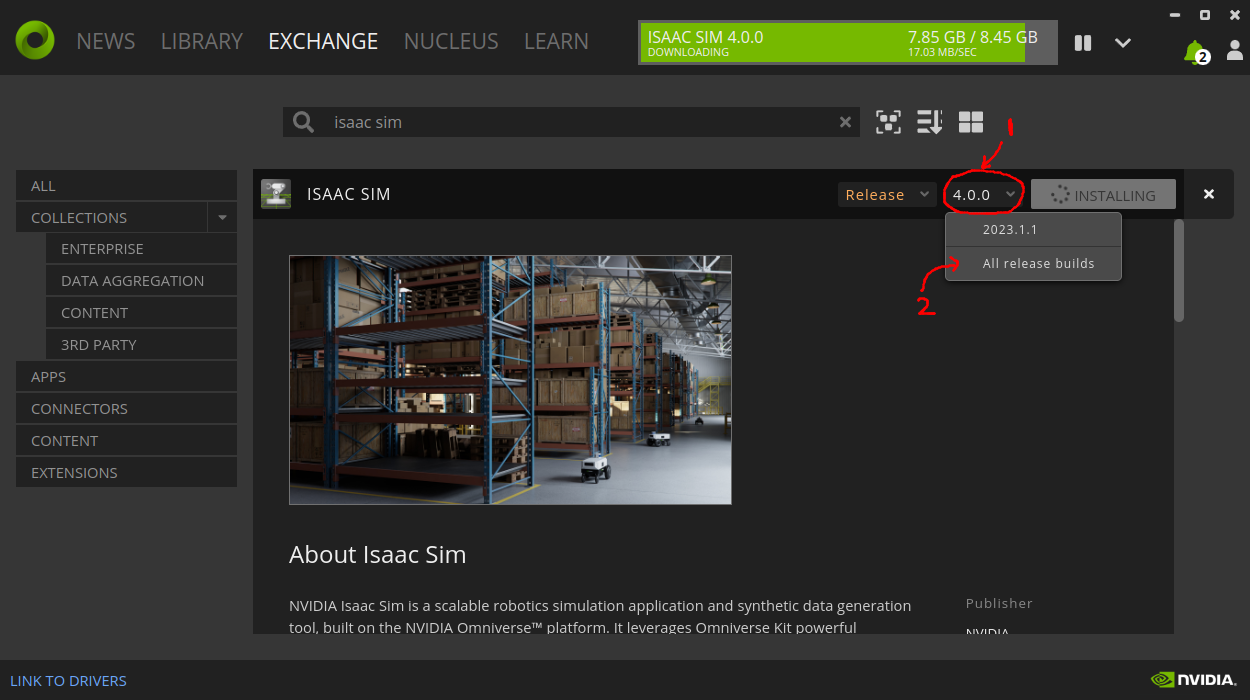
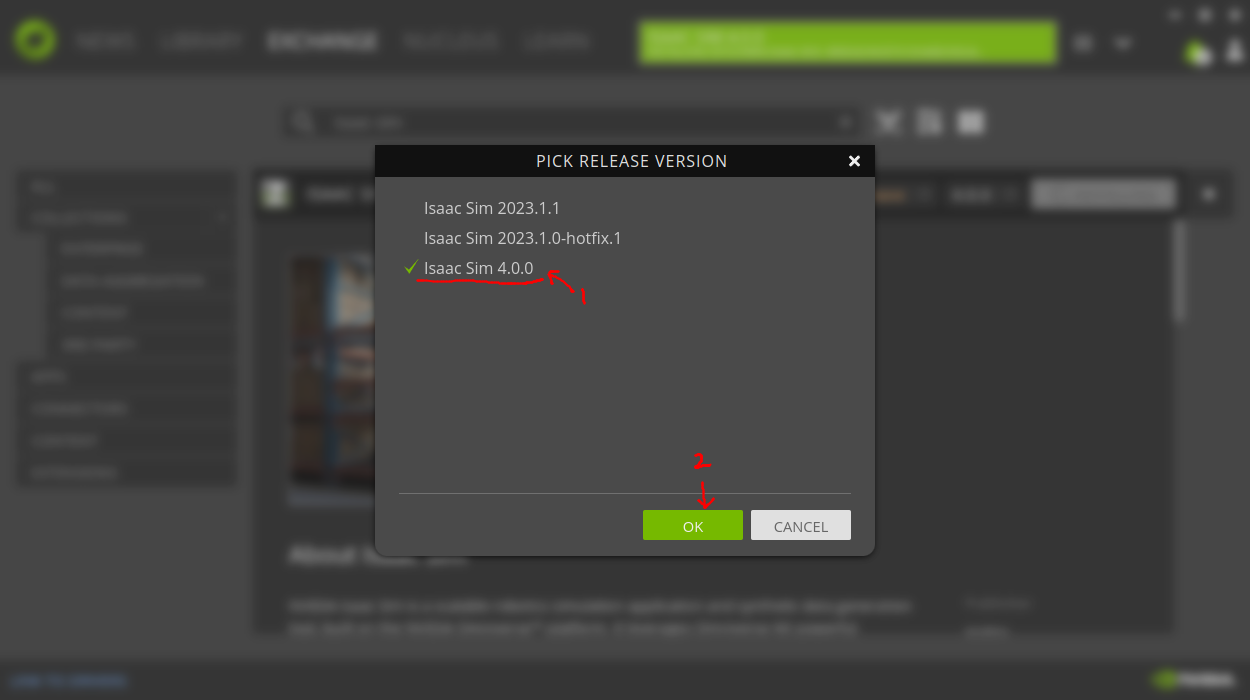
注意:在安装 Isaac Sim 时候,一定要手动选择安装的版本为 4.0.0(2024.6.6.的最新版本为 4.0.0,这样才能和后续 Python 安装的保持一致)如下中,右两图所示:
需要注意的是如果你使用的是 zsh 代替了原始的 bash 终端,则需要按照 No module named ‘omni.isaac’ when using zshell instead of bash 中的方法,对 ${HOME}/.local/share/ov/pkg/isaac_sim-* 下的两个文件分别进行修改,setup_conda_env.sh 中的修改为:
# 第一行修改为
#!/bin/zsh
# 第二行修改为
SCRIPT_DIR="$( cd "$( dirname "$0" )" && pwd )" # 因为原来而 $BASH_SOURCE[0] 在 zsh 下位置是错误的setup_python_env.sh 中的修改为:
# 第一行修改为
#!/bin/zsh
# 第二行修改为
SCRIPT_DIR=$(dirname "${(%):-%x}") # 还是因为原来的方法找不到当前文件位置IsaacLab 安装
这里推荐使用 IsaacLab,这个是对 OmniIsaacGymEnvs 的改进版本,有详细的参考文档以及教学,可以直接参考 Installation using Isaac Sim Binaries 进行安装,不要使用Pip installation,因为这会重新下载Isaac Sim而且不完整,安装IsaacLab流程如下:
- 设置虚拟链接
ln -s ${HOME}/.local/share/ov/pkg/isaac-sim-4.2.0 _isaac_sim(确定左侧路径就是你的isaac-sim安装位置,注意版本号) - 创建conda中的新环境
./isaaclab.sh --conda(如果是zsh终端,需要先修改isaaclab.sh文件中19行附近的export ISAACLAB_PATH="$( cd "$( dirname "${BASH_SOURCE[0]}" )" &> /dev/null && pwd )"为export ISAACLAB_PATH="$( cd "$( dirname "$0" )" && pwd )"因为前面那个指令是bash中的,可能无法找到正确的路径)创建完成后,我们进入isaaclab环境后,使用isaaclab指令就相当于执行了./isaaclab.sh脚本了
conda activate isaaclab安装训练框架isaaclab -i rl_games,安装后可能还需要再装一次pip install rl_games,可能是bug- 环境测试,我们直接执行训练样例代码,来自 IsaacSim - sample - Reinforcement Learning,我们使用第三个(因为它是可以使用GPU加速的),训练 cartpole 用时 45s,其他还有两个环境可以测试自带的环境请见 - Environments,训练 Ant 用时 2:42,下面以训练 Cartpole 为例:
# install python module (for rl-games),安装 rl-games
./isaaclab.sh -i rl_games
conda activate isaaclab
# run script for training(如果使用的是 conda 进行的安装,使用 python 和 ./isaaclab.sh -p 是一样的)
python source/standalone/workflows/rl_games/train.py --task Isaac-Cartpole-v0 --headless
python source/standalone/workflows/rl_games/train.py --task Isaac-Cartpole-v0 --headless
# run script for playing with 32 environments,模型权重保存在 /IsaacLab/logs/rl_games 下,例如我的就是如下位置
python source/standalone/workflows/rl_games/play.py --task Isaac-Cartpole-v0 --num_envs 32 --checkpoint /home/yy/Coding/GitHub/IsaacLab/logs/rl_games/cartpole/2024-06-18_22-12-56/nn/last_cartpole_ep_150_rew__4.6873245_.pth
Isaac Sim Docker 安装
我按照 Isaac Sim Container Installation 中的安装流程,基于 nvcr.io/nvidia/isaac-sim:4.0.0 安装了基础的 isaac-sim,我在其基础上配置了 conda, zsh, vim, tmux,...,可以直接使用 IsaacLab 和 IsaacGymEnvs。使用方法 docker pull wtyyy/isaacsim:latest,执行
docker run --name isaac-sim --entrypoint zsh -it --runtime=nvidia --gpus all -e "ACCEPT_EULA=Y" --rm --network=host \
-v ~/docker/isaac-sim/cache/kit:/isaac-sim/kit/cache:rw \
-v ~/docker/isaac-sim/cache/ov:/root/.cache/ov:rw \
-v ~/docker/isaac-sim/cache/pip:/root/.cache/pip:rw \
-v ~/docker/isaac-sim/cache/glcache:/root/.cache/nvidia/GLCache:rw \
-v ~/docker/isaac-sim/cache/computecache:/root/.nv/ComputeCache:rw \
-v ~/docker/isaac-sim/logs:/root/.nvidia-omniverse/logs:rw \
-v ~/docker/isaac-sim/data:/root/.local/share/ov/data:rw \
-v ~/docker/isaac-sim/documents:/root/Documents:rw \
wtyyy/isaacsim:latest即可启动容器。
如果报错docker: Error response from daemon: unknown or invalid runtime name: nvidia.,则需要安装nvidia-container-toolkit,参考Install with apt,如果安装完成后还是报错,参考GitHub issus - Docker Error - Unknown or Invalid Runtime Name: Nvidia,修改/etc/docker/daemon.json文件包含如下内容:
{
"runtimes": {
"nvidia": {
"path": "nvidia-container-runtime",
"runtimeArgs": []
}
}
}重启docker:
sudo systemctl daemon-reload
sudo systemctl restart docker